For working satellites, horizontally polarised yagi antennas will be mounted on a non-conductive crossboom made of FRP (Fibreglass Reinforced Polymer).
A Yaesu G-800DXA azimuth rotator is already on station, so only a system to rotate elevation is required.
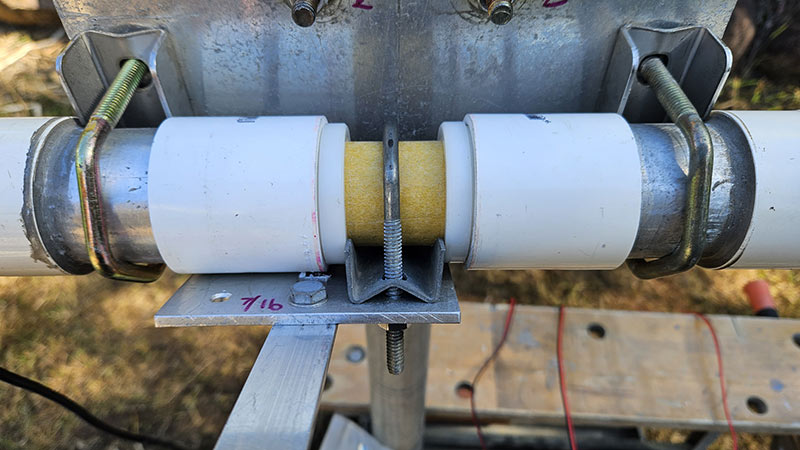
Elevation rotation is achieved using a 12VDC linear actuator connected to an arm which is U-bolted to the FRP crossboom, and rotates within a DIY bearing arrangement made of ally pipe (for clamping to mounting plate), and PVC Couplers which house the bushes.
Only common handyman tools are required to fabricate something like this.
Drill press & drill bits, bench vice, hacksaw, file, various spanners, screwdrivers.
The main components of the system are:
FRP Crossboom
RT38x5.0, 38mm diameter, 5mm wall, 5.8m length – cut length to suit
https://www.grpaustralia.com.au/our-products/frp-structural-sections/Round-Tube-p138645334

Choose yellow or yellow.
Aluminium tubing
2 x aluminium tube lengths, 48.44mm diameter, 4.47mm wall x 80mm long – the strong part that is clamped to the mounting plate by U-bolts and V-clamps.
40mm PVC Couplers are a snug fit over this tube.
Various suppliers
PVC Couplers
These “contain” the bushes and are a tight compression fit over the length of aluminium pipe pieces.
4 x 40mm PVC Pressure Pipe Couplers – compression fit over ally tubing length at both ends
https://www.bunnings.com.au/holman-40mm-press-pvc-coupling_p3140853
Nylon Camshaft Bushes with Flange
4 x Bushes, suit 38mm shaft
https://www.aussietruckparts.com.au/product/bush-camshaft-nylon/
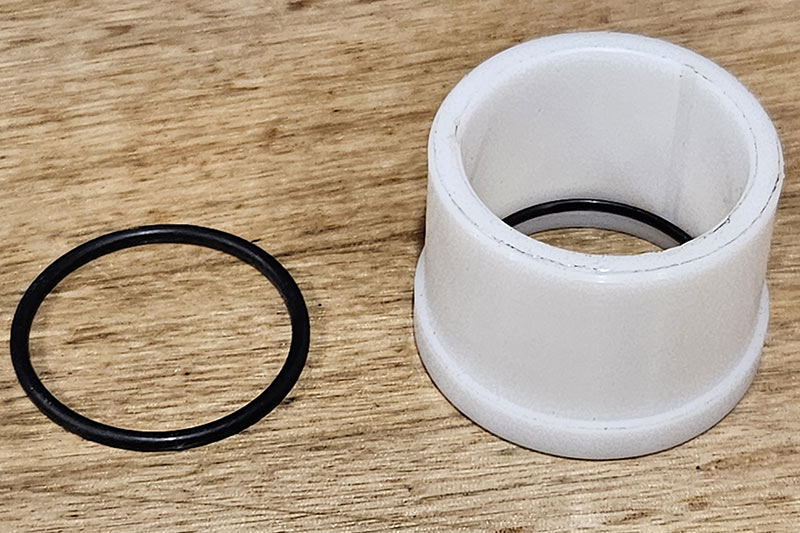
With the O-ring, it will be a tight fit over the 38mm FRP tube. Use some grease.
Or, remove the O-ring with a small flat-blade screwdriver and discard.

These bushes are used on the “inner” side of the PVC Coupler.
Nylon Camshaft Bushes
2 x Bushes, suit 38mm shaft
https://www.aussietruckparts.com.au/product/cambush-nylon-rockwell-drive/

This bush is placed in the outer end of the PVC Couplers.

A flanged bush is then used to contain this bush with the coupler, which in turn is contained by the Hose Clamp.
Note some marine grease has been added inside.
Linear Actuator
12VDC, 350mm travel, 5.7mm/second, 1500N max load.
Various ebay vendors https://www.ebay.com.au/sch/i.html?_from=R40&_trksid=p4432023.m570.l1313&_nkw=linear+actuator+350mm&_sacat=0


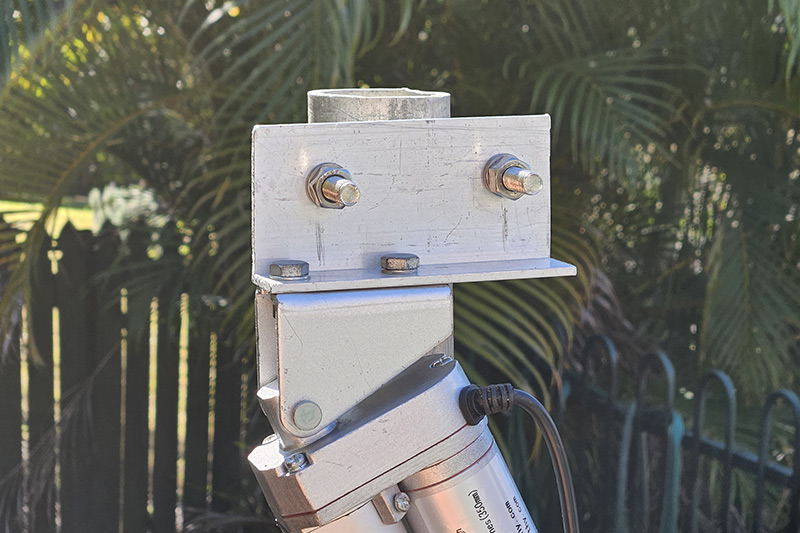
Upper Linear Actuator Mount
Top of the actuator bracket is mounted 645mm above the crossboom centre-line on a bracket made of 50mm x 25mm x 3mm aluminium angle, 100mm long, and clamped to the mast with a U-bolt and V-clamp.
Actuator protrudes ~ 35mm back from the mast.
In addition to maximum actuator travel length, the height above the crossboom and length of arm will dictate how much rotation can be achieved.
Washers are used to take up the space in the actuator brackets to prevent skewing.

Lower Linear Actuator Arm
A 250mm length of 20 x 20 x 3mm aluminium angle is the actuator arm and is bolted to a flat bracket (3mm aluminium) that is clamped to the crossboom.

Note how the arm’s V-block keeps the inner flange bushes in place.
Stainless Steel Hose Clamps
Hose clamp, 21 – 44mm.
Clamps retain the outer flanged bushes (which in turn retain the non-flanged bush in the outer end of the PVC Coupler).
https://www.bunnings.com.au/kinetic-21-44mm-304-stainless-steel-hose-clamp_p0110739

Various U-bolts, V-Clamps, nuts & bolts
Aluminium off-cuts for brackets, and actuator arm
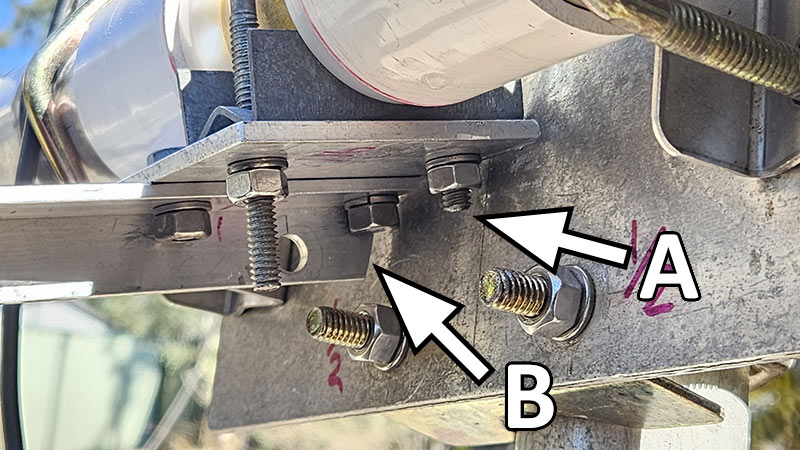
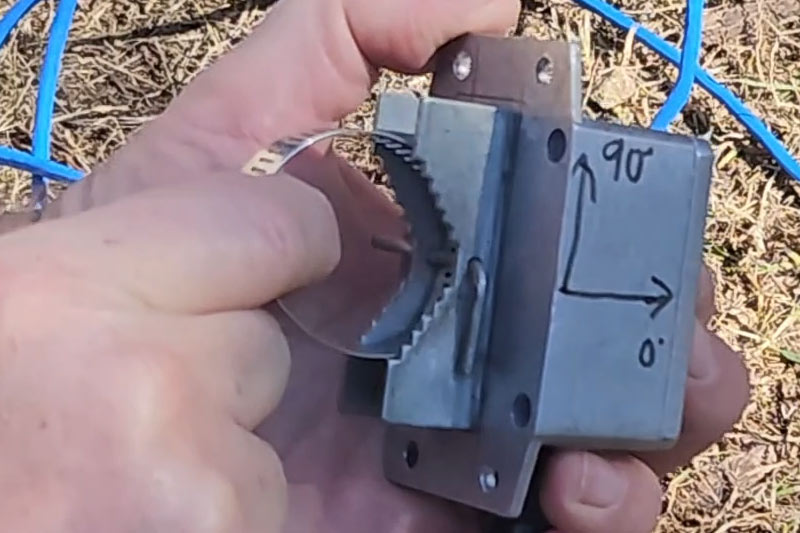
Allowing >90° Movement
Just over 90° degree of movement is desired so that there is some adjustment room when setting up antennas on the crossboom.
A – U-bolt thread is cut shorter on inner side to allow rotation > 90°.
B – Right angle arm is angled at end using file to allow rotation > 90°.
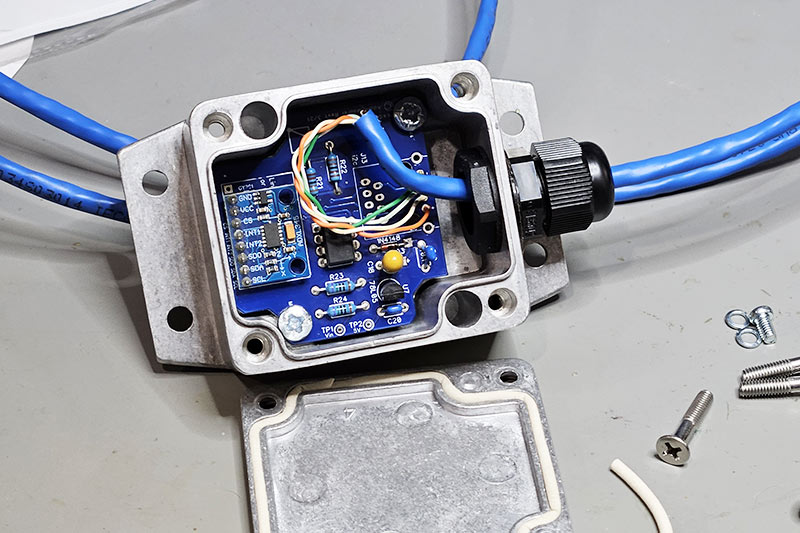
Elevation Sensor
The sensor uses an ADXL345 accelerometer, and communicates back to the Teensy-based K3NG controller board via I2C using bus extenders at each end.
Communication over at least 50m of Cat5 cable can be expected.
https://vk4ghz.com/product/adxl345-universal-remote-unit/
Sensor board is mounted in a diecast aluminium enclosure.
Cat5 cable feeds through a cable gland.
Enclosure has a V-clamp glued to the rear using JB Weld 2-part epoxy.
A 3.2mm hole was drilled through the V-clamp to take a 3mm diameter pin which retains the hose clamp.
Now to mount the yagis to the crossboom!
In this video, Adam shows the crossboom, bearing arrangement, and how the linear actuator moves.
Back in the shack, and a K3NG based rotator controller board with Nextion touchscreen interface is used for both azimuth and elevation control.
K3NG Project Wiki
There is extensive information on the Wiki. Note menu on right hand side.
https://github.com/k3ng/k3ng_rotator_controller/wiki
K3NG Rotator Controller Github
Code can be downloaded from Github.
https://github.com/k3ng/k3ng_rotator_controller
K3NG Project Discussion Group on groups.io
Groups.io is a great intelligent alternative to the tedious brain-dead dribble found on social media platforms.
https://groups.io/g/radioartisan/topics
VK4GHZ Nextion Touchscreen firmware and Information
Right here on this website!
https://vk4ghz.com/category/ham-radio/k3ng-rotator-controller/